




Làseranàlisi i processament de senyals de detecció remota de veu
La descodificació del soroll del senyal: anàlisi del senyal i processament de la detecció remota de la parla amb làser
En el meravellós àmbit de la tecnologia, la detecció remota de la parla per làser és com una bella simfonia, però aquesta simfonia també té el seu propi "soroll": el soroll del senyal. Com un públic inesperadament sorollós en un concert, el soroll sovint és perjudicial endetecció de veu làserSegons la font, el soroll de la detecció remota del senyal de veu làser es pot dividir aproximadament en el soroll introduït pel propi instrument de mesura de vibracions làser, el soroll introduït per altres fonts de so a prop de l'objectiu de mesura de vibracions i el soroll generat per pertorbacions ambientals. La detecció de veu a llarga distància en última instància necessita obtenir senyals de veu que puguin ser reconeguts per l'oïda humana o les màquines, i molts sorolls barrejats de l'entorn extern i el sistema de detecció reduiran l'audibilitat i la intel·ligibilitat dels senyals de veu adquirits, i la distribució de la banda de freqüència d'aquests sorolls coincideix parcialment amb la distribució de la banda de freqüència principal del senyal de veu (uns 300~3000 Hz). No es pot filtrar simplement amb filtres tradicionals i cal un processament addicional dels senyals de veu detectats. Actualment, els investigadors estudien principalment la reducció de soroll del soroll de banda ampla no estacionari i el soroll d'impacte.
El soroll de fons de banda ampla es processa generalment mitjançant mètodes d'estimació d'espectre a curt termini, mètodes de subespai i altres algoritmes de supressió de soroll basats en el processament de senyals, així com mètodes tradicionals d'aprenentatge automàtic, mètodes d'aprenentatge profund i altres tecnologies de millora de la parla per separar els senyals de parla pura del soroll de fons.
El soroll impulsiu és el soroll de motejat que pot ser introduït per l'efecte de motejat dinàmic quan la ubicació de l'objectiu de detecció es veu alterada per la llum de detecció del sistema de detecció LDV. Actualment, aquest tipus de soroll s'elimina principalment detectant la ubicació on el senyal té un pic d'energia alta i substituint-lo pel valor predit.
La detecció remota de veu per làser té perspectives d'aplicació en molts camps com la intercepció, la monitorització multimode, la detecció d'intrusions, la cerca i el rescat, el micròfon làser, etc. Es pot predir que la futura tendència de recerca de la detecció remota de veu per làser es basarà principalment en (1) millorar el rendiment de mesura del sistema, com ara la sensibilitat i la relació senyal-soroll, optimitzant el mode de detecció, els components i l'estructura del sistema de detecció; (2) Millorar l'adaptabilitat dels algoritmes de processament de senyals, de manera que la tecnologia de detecció de veu per làser pugui adaptar-se a diferents distàncies de mesura, condicions ambientals i objectius de mesura de vibracions; (3) Selecció més raonable dels objectius de mesura de vibracions i compensació d'alta freqüència dels senyals de veu mesurats en objectius amb diferents característiques de resposta de freqüència; (4) Millorar l'estructura del sistema i optimitzar encara més el sistema de detecció mitjançant
miniaturització, portabilitat i procés de detecció intel·ligent.
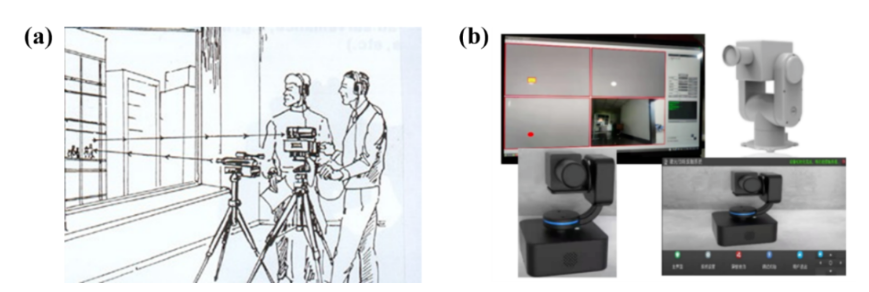
FIG. 1 (a) Diagrama esquemàtic de la intercepció làser; (b) Diagrama esquemàtic del sistema antiintercepció làser
Data de publicació: 14 d'octubre de 2024