




Disseny defotòniccircuit integrat
Circuits integrats fotònicsEls PIC (Pics) sovint es dissenyen amb l'ajuda de scripts matemàtics a causa de la importància de la longitud del camí en interferòmetres o altres aplicacions que són sensibles a la longitud del camí.PICes fabrica mitjançant la creació de patrons de múltiples capes (normalment de 10 a 30) sobre una oblia, que estan compostes per moltes formes poligonals, sovint representades en format GDSII. Abans d'enviar el fitxer al fabricant de la fotomàscara, és molt desitjable poder simular el PIC per verificar la correcció del disseny. La simulació es divideix en múltiples nivells: el nivell més baix és la simulació electromagnètica tridimensional (EM), on la simulació es realitza a nivell de sublongitud d'ona, tot i que les interaccions entre els àtoms del material es gestionen a escala macroscòpica. Els mètodes típics inclouen el domini del temps de diferències finites tridimensional (3D FDTD) i l'expansió de mode propi (EME). Aquests mètodes són els més precisos, però no són pràctics per a tot el temps de simulació PIC. El següent nivell és la simulació EM de 2,5 dimensions, com ara la propagació de feix de diferències finites (FD-BPM). Aquests mètodes són molt més ràpids, però sacrifiquen una mica de precisió i només poden gestionar la propagació paraxial i no es poden utilitzar per simular ressonadors, per exemple. El següent nivell és la simulació EM 2D, com ara 2D FDTD i 2D BPM. Aquestes també són més ràpides, però tenen una funcionalitat limitada, com ara que no poden simular rotadors de polarització. Un altre nivell és la simulació de matrius de transmissió i/o dispersió. Cada component principal es redueix a un component amb entrada i sortida, i la guia d'ones connectada es redueix a un element de desplaçament de fase i atenuació. Aquestes simulacions són extremadament ràpides. El senyal de sortida s'obté multiplicant la matriu de transmissió pel senyal d'entrada. La matriu de dispersió (els elements de la qual s'anomenen paràmetres S) multiplica els senyals d'entrada i sortida d'un costat per trobar els senyals d'entrada i sortida de l'altre costat del component. Bàsicament, la matriu de dispersió conté la reflexió dins de l'element. La matriu de dispersió sol ser el doble de gran que la matriu de transmissió en cada dimensió. En resum, des de la EM 3D fins a la simulació de matrius de transmissió/dispersió, cada capa de simulació presenta un compromís entre velocitat i precisió, i els dissenyadors trien el nivell de simulació adequat per a les seves necessitats específiques per optimitzar el procés de validació del disseny.
Tanmateix, basar-se en la simulació electromagnètica de certs elements i utilitzar una matriu de dispersió/transferència per simular tot el PIC no garanteix un disseny completament correcte davant de la placa de flux. Per exemple, és probable que les longituds de trajectòria mal calculades, les guies d'ona multimode que no aconsegueixen suprimir eficaçment els modes d'ordre superior o dues guies d'ona que estan massa a prop l'una de l'altra i que provoquen problemes d'acoblament inesperats passin desapercebudes durant la simulació. Per tant, tot i que les eines de simulació avançades proporcionen potents capacitats de validació del disseny, encara requereix un alt grau de vigilància i una inspecció acurada per part del dissenyador, combinada amb experiència pràctica i coneixements tècnics, per garantir la precisió i la fiabilitat del disseny i reduir el risc del diagrama de flux.
Una tècnica anomenada FDTD dispersa permet realitzar simulacions FDTD 3D i 2D directament sobre un disseny PIC complet per validar el disseny. Tot i que és difícil per a qualsevol eina de simulació electromagnètica simular un PIC a gran escala, la FDTD dispersa és capaç de simular una àrea local força gran. En la FDTD 3D tradicional, la simulació comença inicialitzant els sis components del camp electromagnètic dins d'un volum quantificat específic. A mesura que avança el temps, es calcula el nou component de camp en el volum, i així successivament. Cada pas requereix molts càlculs, per la qual cosa triga molt de temps. En la FDTD 3D dispersa, en lloc de calcular a cada pas en cada punt del volum, es manté una llista de components de camp que teòricament poden correspondre a un volum arbitràriament gran i es poden calcular només per a aquests components. A cada pas de temps, s'afegeixen punts adjacents als components del camp, mentre que els components del camp per sota d'un cert llindar de potència s'eliminen. Per a algunes estructures, aquest càlcul pot ser diversos ordres de magnitud més ràpid que la FDTD 3D tradicional. Tanmateix, les FDTDS disperses no funcionen bé quan es treballa amb estructures dispersives perquè aquest camp de temps s'escampa massa, donant lloc a llistes massa llargues i difícils de gestionar. La figura 1 mostra una captura de pantalla d'exemple d'una simulació FDTD 3D similar a un divisor de feix de polarització (PBS).
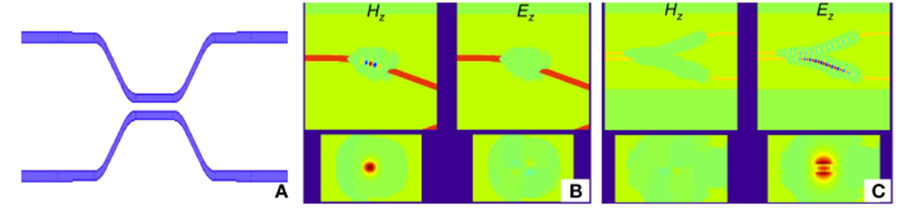
Figura 1: Resultats de la simulació de FDTD dispersa en 3D. (A) és una vista superior de l'estructura que s'està simulant, que és un acoblador direccional. (B) Mostra una captura de pantalla d'una simulació utilitzant excitació quasi-TE. Els dos diagrames anteriors mostren la vista superior dels senyals quasi-TE i quasi-TM, i els dos diagrames següents mostren la vista transversal corresponent. (C) Mostra una captura de pantalla d'una simulació utilitzant excitació quasi-TM.
Data de publicació: 23 de juliol de 2024